The equation of the line l can also be written:
<0,-2,2>+λ<2,3,-1> where <2,3,-1> is the direction vector, λ is a scalar quantity determining points on the line. A line cannot define a plane because there are many planes (an infinitude) containing l. We need three non-collinear points to define a plane. To find two points on l, use λ=0 and λ=1: A(0,-2,2) and B(2,1,1).
The equation of a line m passing through P(2,0,-1) and parallel to l is:
<2,0,-1>+μ<2,3,-1>, where μ is a scalar variable, like λ.
When μ=1 we get another point on the same line: Q(4,3,-2). The lines l and m are parallel so all 4 points can lie on the same plane. The normal of the plane is also normal to all vectors lying in the plane.
So, we can define a plane containing A, B and P.
If O(0,0,0) is the origin of the frame of reference for points on l, then the following vector equations apply:
OA=<0,-2,2>=2i+0j-k, where i, j, k are unit vectors in the x, y, z directions.
OB=<2,1,1>=2i+j+k. Since OA+AB=OB, AB=OB-OA=<2,3,-1> (which is, of course, the direction vector of l).
OP=<2,0,-1>, OQ=<4,3,-2>. OA+AP=OP, AP=OP-OA=<2,2,-3>.
OB+BP=OP, BP=OP-OB=<0,-1,-2>.
If the normal vector n to each is <a,b,c>, then:
<2,3,-1>.n=<2,2,-3>.n=<0,-1,-2>.n=0 (dot products).
Therefore 2a+3b-c=2a+2b-3c=-b-2c=0, from which b=-2c, and 2a=7c.
If c=2, then b=-4 and a=7, n=<7,-4,2>. The equation of the plane, which has the same normal as all vectors on the plane, is derived from the normal:
7x-4y+2z=k. To determine k, simply plug in the coordinates of any point in the plane (that is, any of the points A, B, P, Q).
Let's use A(0,-2,2): k=8+4=12, making the equation of the plane 7x-4y+2z=12.
Now check the other points for consistency:
B(2,1,1): k=14-4+2=12; P(2,0,-1): k=14-0-2=12; Q(4,3,-2): k=28-12-4=12. So all points lie on the plane.
The picture below can be viewed in 3D using filter glasses (left eye red, right eye green or blue).
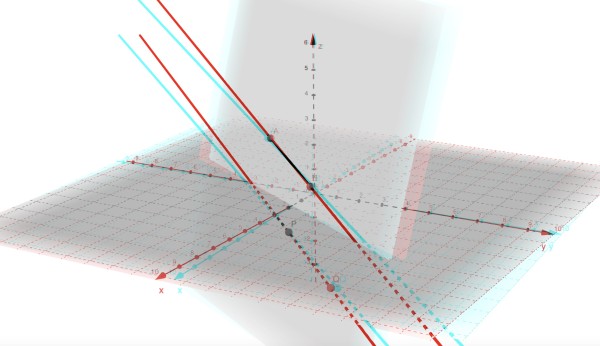
Picture courtesy of GeoGebra Calculator Suite.
The dashed part of lines indicate that they're obscured by the grid